https://imaginationkoohyeon.tistory.com/5
VMware환경 설정
컴퓨터 포맷시켜서 VMware까는 것부터 우분투 설치까지 처음부터 다시해야하는 상황.https://louis-j.tistory.com/entry/VMWARE-%EC%84%A4%EC%B9%98-VMware-%EB%8B%A4%EC%9A%B4%EB%A1%9C%EB%93%9C-%EB%B0%8F-%EC%84%A4%EC%B9%98-%EB%B0%A9%EB
imaginationkoohyeon.tistory.com
원활한 다운로드를 위해 왼쪽 밑에 Show Application을 클릭한 뒤 Settings에 들어가서 Power Saving을 꺼준다.

기본 옵션이 5분으로 되어 있는거 같은데 처음 다운 받고 어플 켜는데 시간이 오래 걸려서 맨날 새로 password 치고 들어가귀가 번거롭다. 미리 문서화해둔 자료들을 불러와서 열어보기 위해 sudo apt install libreoffice명령어도 깔아준다. 우분투환경에서 처음에 이걸 깔아줘야 word파일 같은게 열린다.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
이런식으로 순서대로 명령어를 입력해서 ros-noetic을 깔아준다. 전체 패키지를 설치하는데 시간에 꽤 걸린다.
sudo apt install -y python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential와 sudo apt install libgstreamer1.0-dev
로 의존성 설치해준 다음 rosdep초기화 및 업데이트하면 아래와 같이 실행 ROS실행을 확인할 수 있다.
gazebo11 설치 방법
+ sudo -E sh -c echo deb http://packages.osrfoundation.org/gazebo/ubuntu\-stable focal main > /etc/apt/sources.list.d/gazebo-stable.list
+ sudo -E sh -c sleep 3; apt-get update; apt-get install -y -q libgazebo11-dev gazebo11
nano ~/.bashrc
차례대로 터미널에 입력하고~/bashrc코드의 제일 아래에
source /opt/ros/noetic/setup.bash
alias cm='cd ~/catkin_ws && catkin_make'
alias srcws='source ~/catkin_ws/devel/setup.bash'
alias ros_gz='roslaunch gazebo_ros empty_world.launch'
alias px4_gz='cd ~/PX4-Autopilot && make px4_sitl gazebo'
내용을 추가해서 저장한다.
PX4-Autopilot설치
PX4+Gazebo실행
143정도 make하는거 같은데 왤케 오래걸리지...뭔가 빼먹은게 있나..?
추가적인 GStreamer 의존성 설치
sudo apt install -y libgstreamer1.0-dev gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly
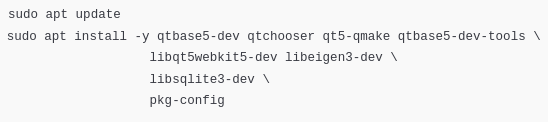
QGroundControl을 설치하기 위해 필요한 의존성 패키지를 설치
AppImage 설치
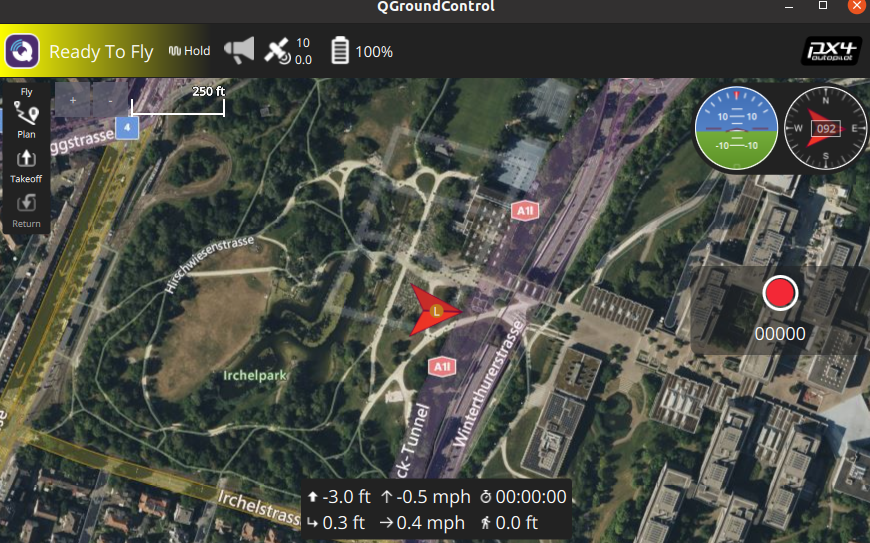
chmod +x QGroundControl.AppImage 밑의 명령어로 깃에서 먼저 다운받고 풀어서 파일 경로를 복붙하면 되는 것 같다. 여튼 열렸다...

QGC에서 가제보 실행 코드 움직임을 보려면 QGC먼저 열고 px4_sitl_gazebo를 해주면 된다. 나는 특정 지역으로 좌표를 고정하고 싶어서
echo "export PX4_HOME_LAT=35" >> ~/.bashrc
echo "export PX4_HOME_LON=128" >> ~/.bashrc
echo "export PX4_HOME_ALT=30" >> ~/.bashrc
를 사용해줬다.
'임베디드' 카테고리의 다른 글
| VMware환경 설정 (0) | 2024.11.29 |
|---|
